Problem Statement: To build a smart bin that can be used practically to segregate waste in domestic and industrial waste segregation units.
Why this problem?
As a team, we wanted to find a solution to the common problems we experienced or witnessed in our society.
We noticed that the waste management system in Bangalore was unhygienic and inefficient. Segregation of waste has a lot of advantages. Biodegradable waste can be composted separately while metal and paper can be recycled. These benefits are lost when they are mixed up.
Hence, we decided to build a Self-Segregating Smart Bin, which can provide a practical way and feasible way of segregating waste.
Materials and Software Used:
Raspberry Pi 3B
Logitech Webcam
Servo Motor
SR04 Ultrasonic Sensor
Python
Tensorflow
OpenVino
Implementation:
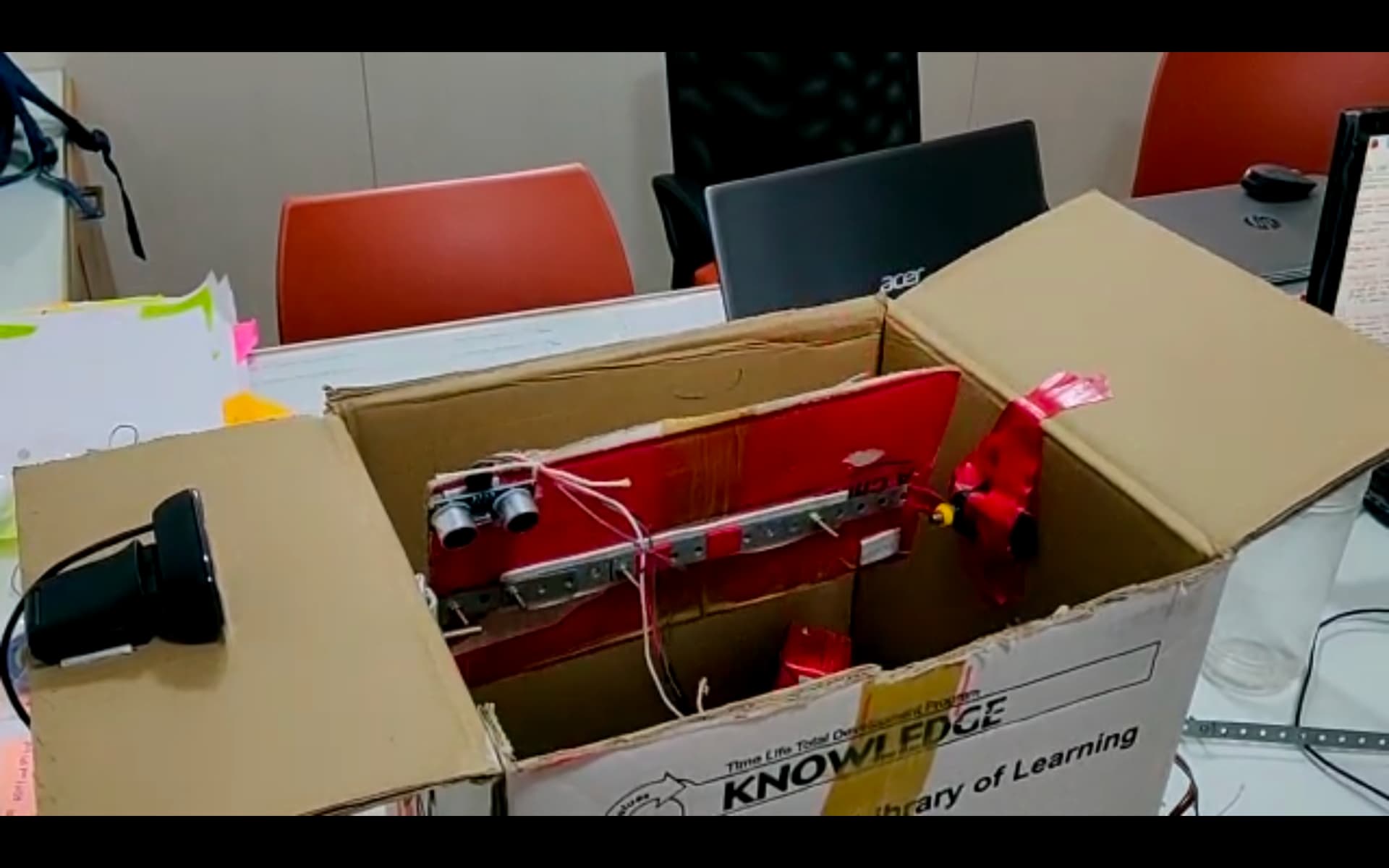
- Hardware:
We have used RaspberryPi as our Microprocessor, to control the sensors, webcam, servo motors, and to process the deep learning models.
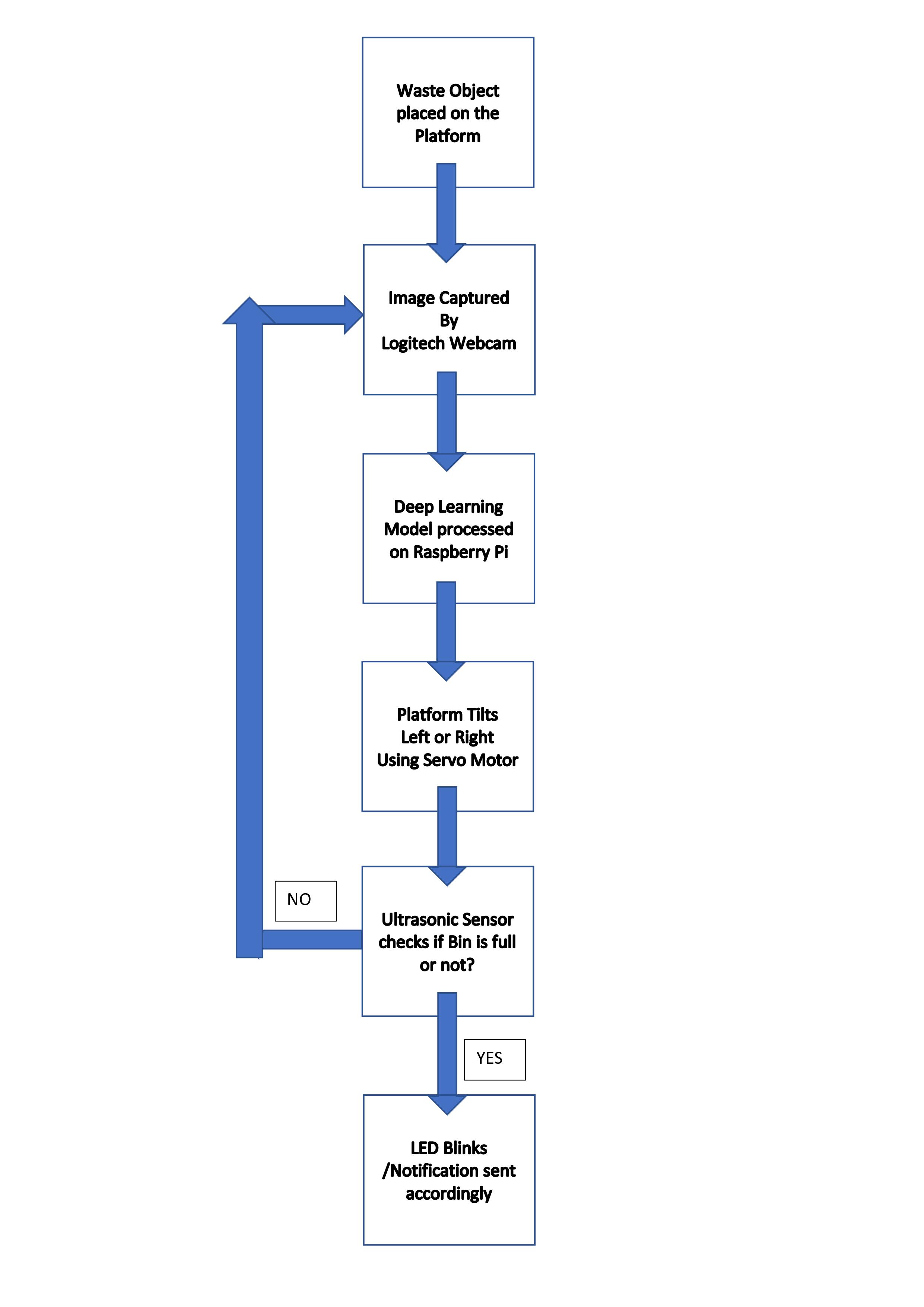
2 Ultrasonic Sensors (HC-SR04) present at the platform level of the bin indicate the presence of waste on the platform. This then triggers the webcam to click a picture of the waste present on the platform.
This picture is then compared with the dataset and categorized into either Biodegradable or Non-biodegradable, by an application called TensorFlow, installed on the RaspberryPi.
Then, a servo motor (MG 995) accordingly tilts the platform to slide the waste item into that respective category.
This process repeated again, with control given back to the Ultrasonic Sensors, to identify the presence of the next item placed on the platform.
- Software:
We have used Google TensorFlow, as the application to run our deep learning models.
We have used Inception V3 as our model, based on its Accuracy and Speed, after comparing this with other models and versions.
Inception V3 is now executed by TensorFlow, which is downloaded onto the RaspberryPi.
When a picture is taken by the webcam, TensorFlow runs the model to identify and categorize the image into either Biodegradable and Non-biodegradable
Based on this result, the servo motor is then programmed to tilt the platform.
In this way, we can design a smart bin that can segregate waste by itself into biodegradable and non-biodegradable.
 , I have a few questions about the bin
, I have a few questions about the bin